Overview
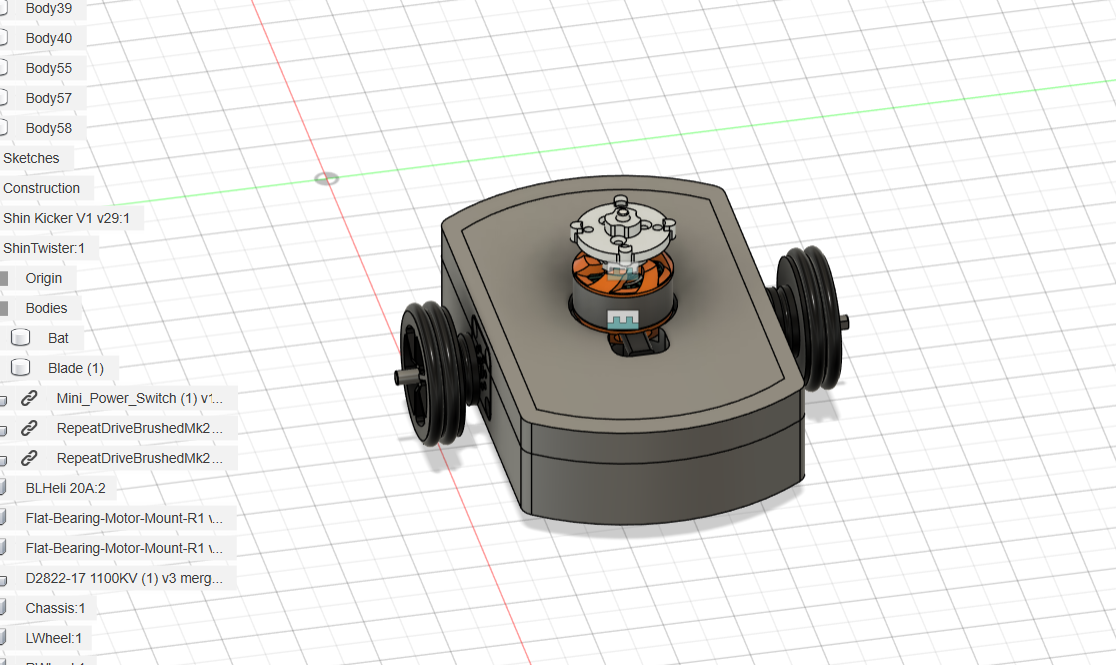
Shin Twister is my second combat robot. It competes in the PLAnt division, which means all components except the electronics have to be 3D printed and the whole robot has to weigh under a pound.
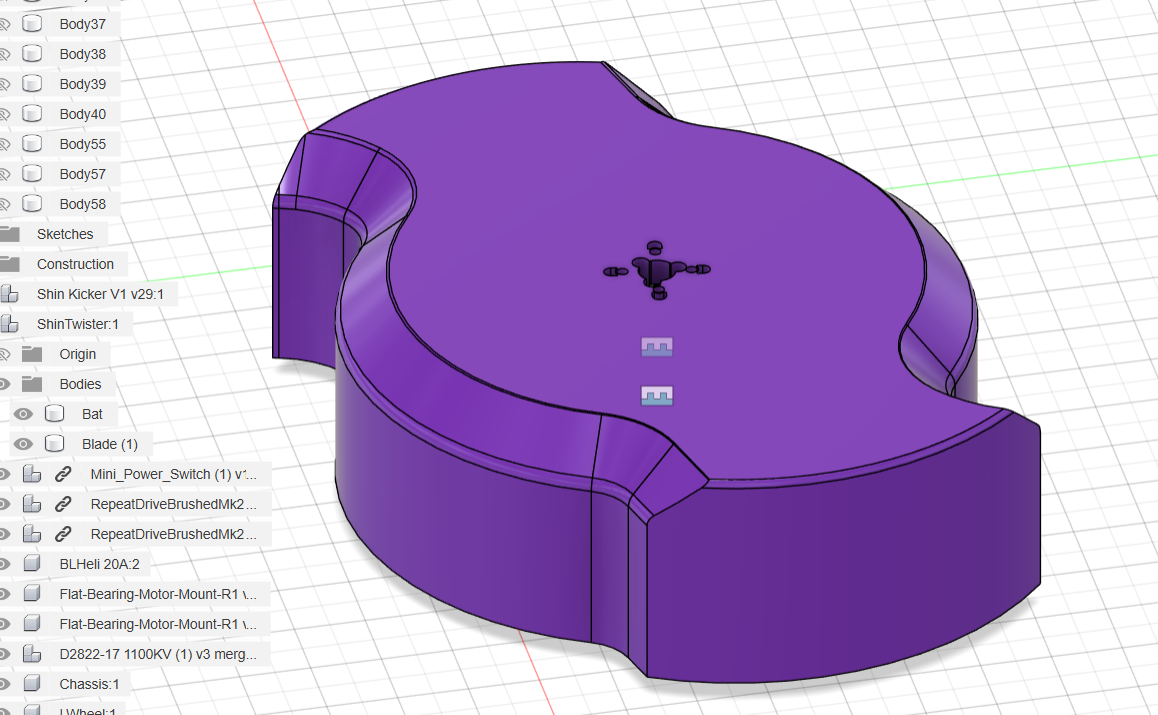
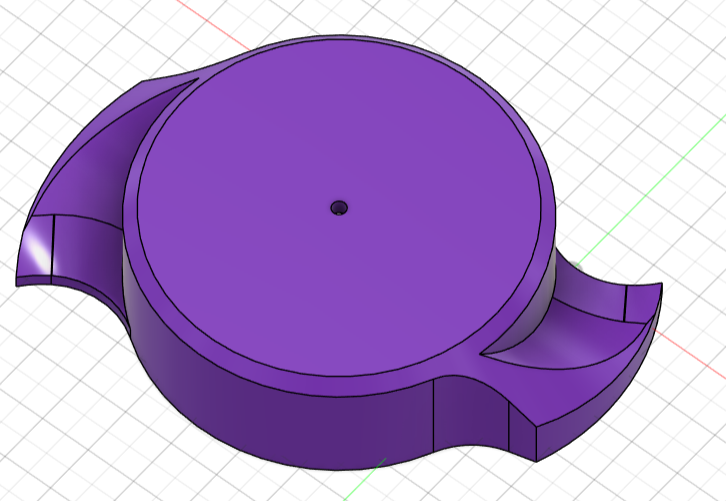
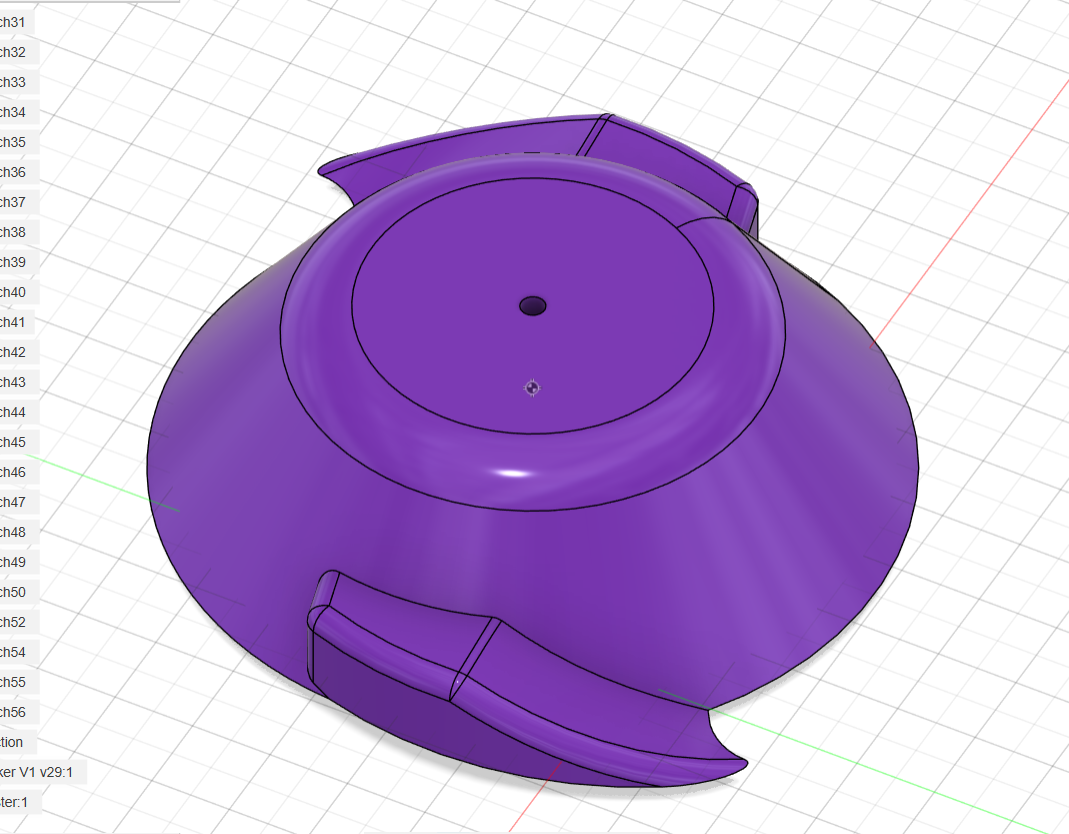
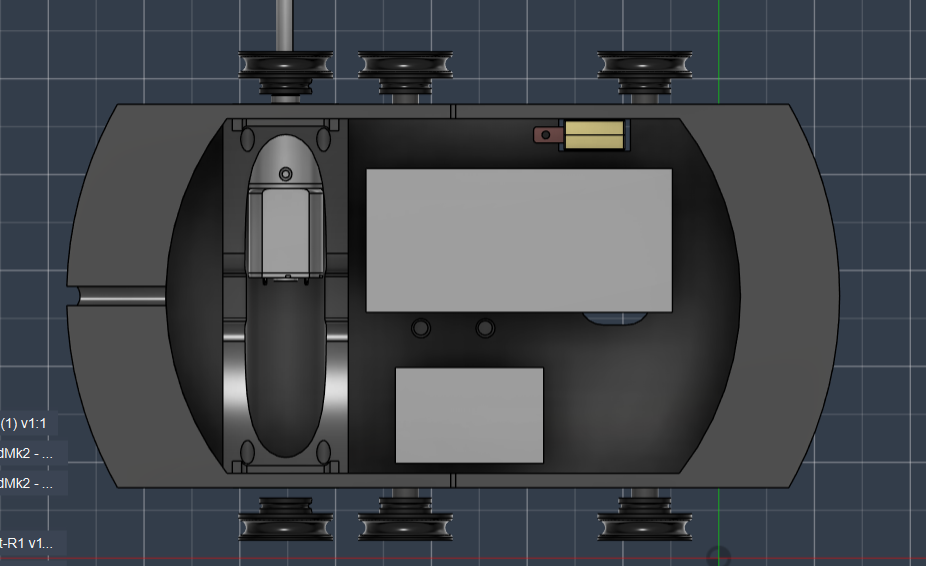
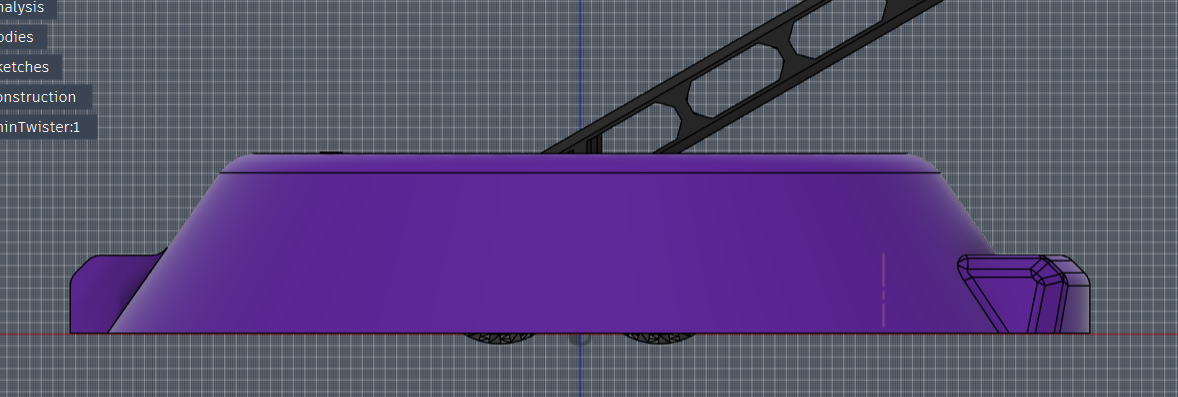
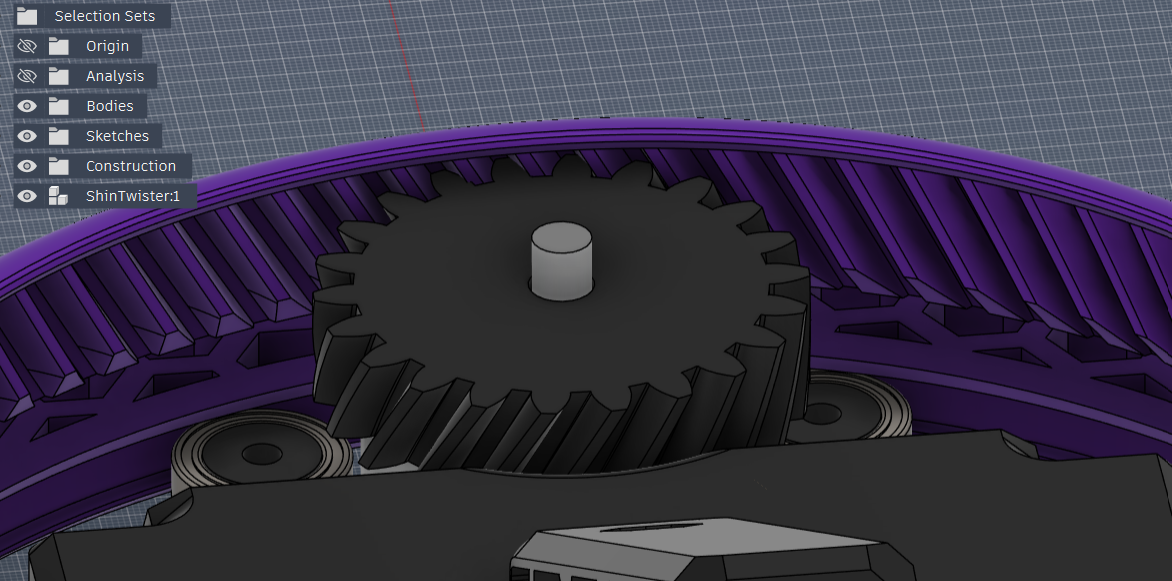
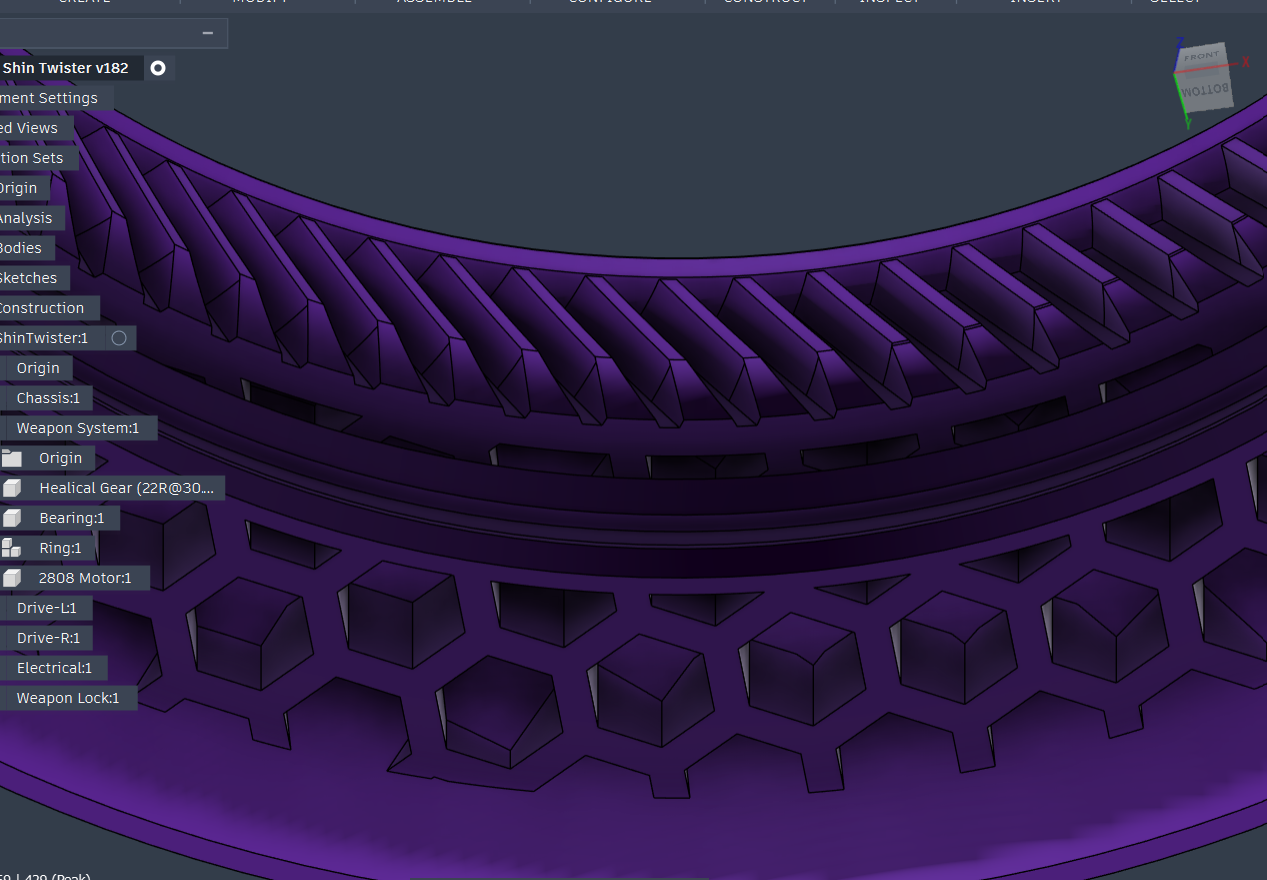
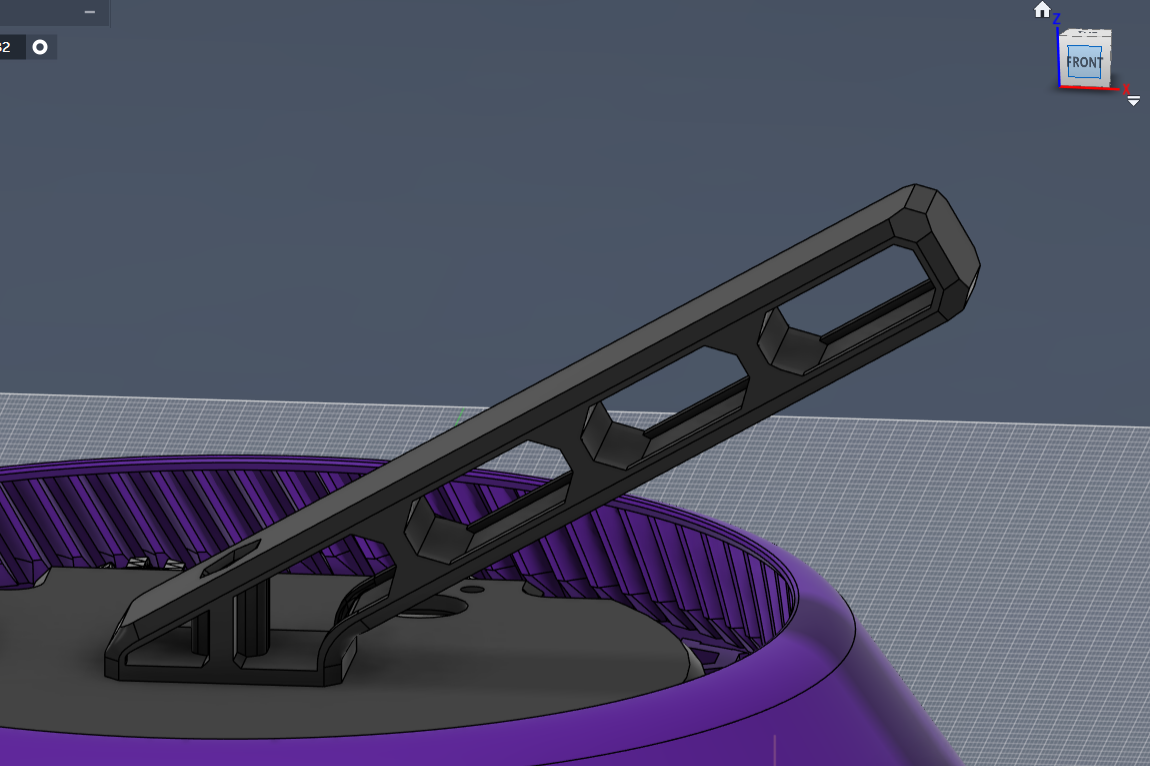
I wanted to build a shell spinner after seeing local competitors use them. The idea is that the entire outside shell rotates with teeth sticking out, storing a large amount of kinetic energy while protecting the internal chassis. I also used this robot as a way to experiment with different materials and electronics.