Initial Idea
For years I wanted to make a combat robot, partly for fun and partly because it forces you to learn real engineering skills: rapid prototyping, repairing things, and making improvements after failure.
At first, I wanted to buy a kit for the normal antweight category. The kit was called the Viper, and it had a blade on the back. Then I found the PLAnt category, which let me use my 3D printing experience to cheaply repair and revise the robot.
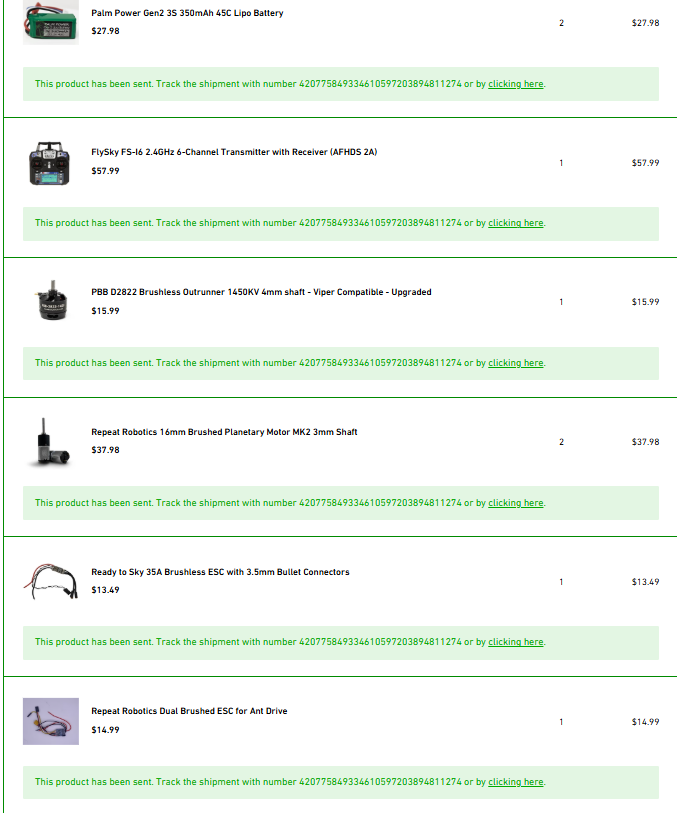
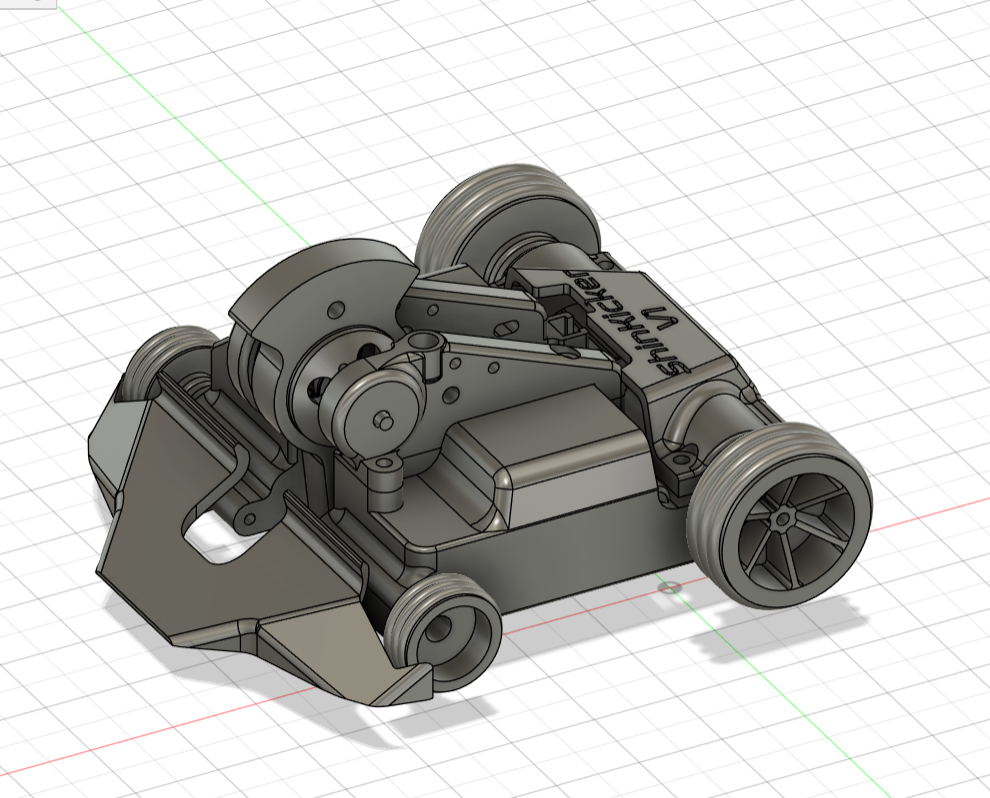
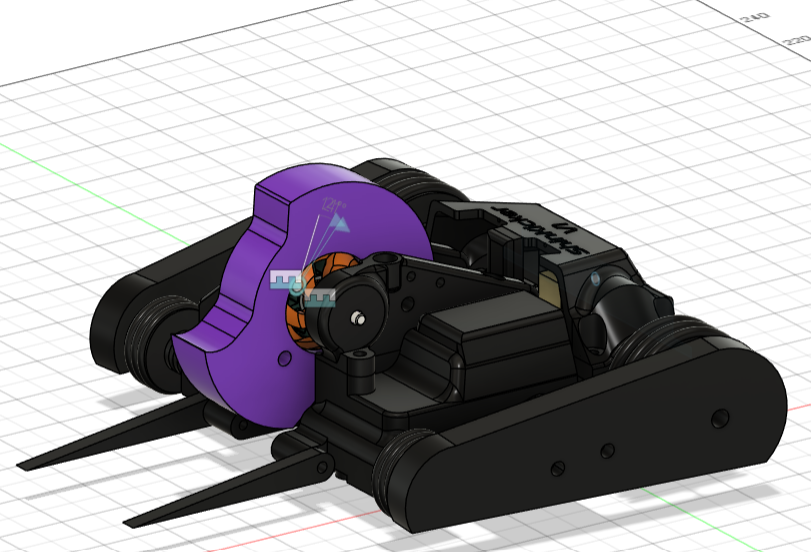
After researching kits, I found Palm Beach Bots’ Plastic Poison kit, which had the parts I needed to start. More experienced builders told me that kit did not perform especially well, and I eventually found Team ORBY’s MAK VS. I used that robot as the starting point for Shin Kicker.